본 포스팅은 University of California Davis ENG 006: Engineering Problem Solving에서 제공하는 ZyBooks의 내용을 바탕으로 작성하였습니다.
Prerequisites
이번 포스팅의 내용을 더 잘 이해하기 위해선 아래의 내용에 대해 알고 오시는 것이 좋습니다.
Introduction
기본 행렬 편과 LU 분해 편을 통해서 우리는 행렬 형태를 이용해 연립 방정식을 풀 수 있다는 것을 확인했다. 이때 핵심적인 역할을 하는 것이 기초적인 행 연산(elementary row operations)에 대응하는 기본 행렬들 (주로 $E$라고 씀) 이었다.
즉, 우리의 목표는 아래와 같이 기본 행 연산들을 수행함으로써 $Ax=b$를 $Ux=c$와 같이 변경해주는 것이다.
여기서 $U$는 상삼각행렬(upper triangular matrix)이다.
만약 $Ax=b$를 $Ux=c$와 같은 형태로 바꿔줄 수 있다면 우리는 back-substitution을 이용해 미지수 $x_1, x_2, x_3$을 수월하게 구해낼 수 있게 된다는 것을 공부하였다.
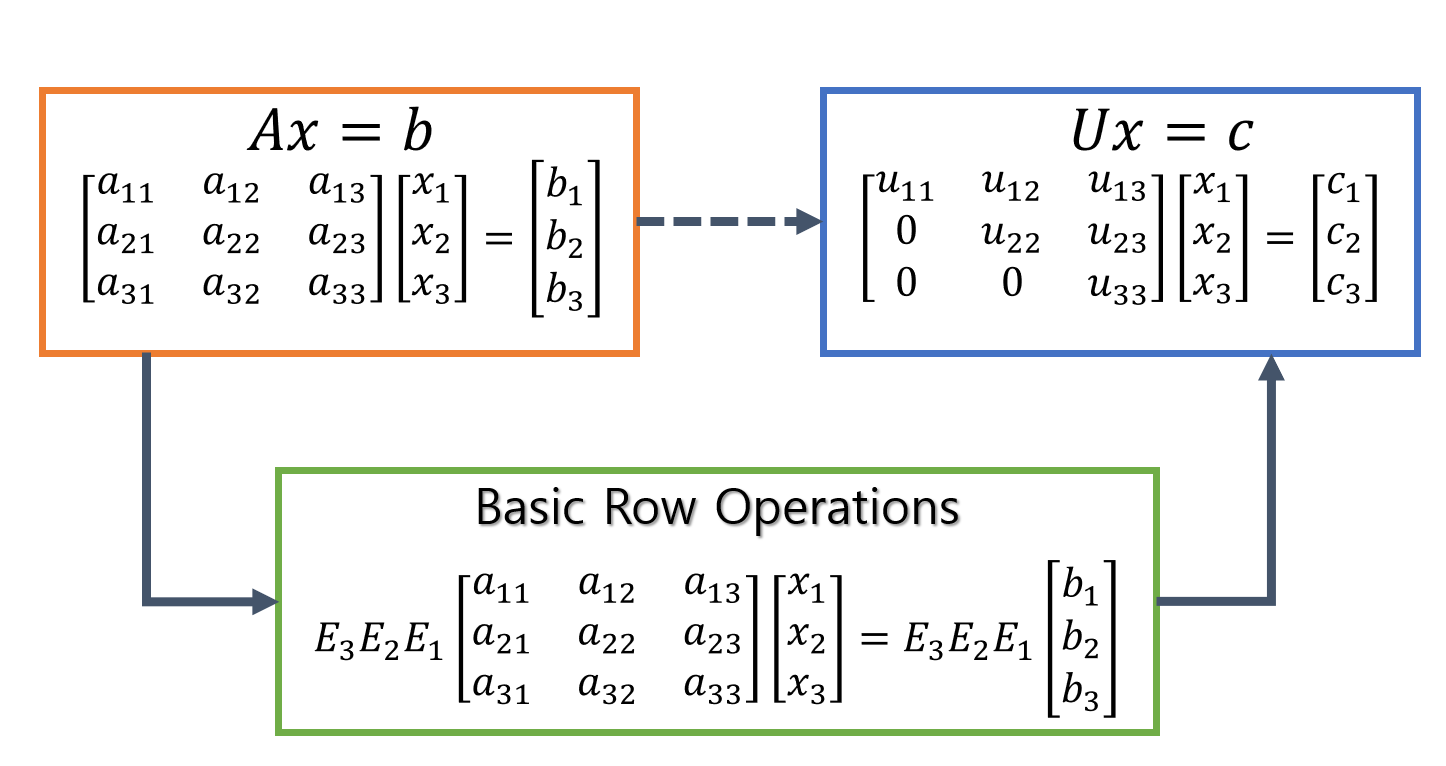
그림 1. 기본 행 연산을 통해 상삼각행렬을 얻는 과정
LU 분해 에서는 위와 같은 방법을 적용할 때 행렬 $A$가 $n\times n$ 형태의 정방 행렬(square matrix)였다.
그런데, 꼭 행렬 $A$가 정방 행렬이어야지만 위와 같은 방식의 row operation을 해줄 수 있는 것은 아니다.
다시 말해, 식의 개수보다 변수의 개수가 많은 경우도 있을 수 있고, 변수의 개수보다 식의 개수가 많은 경우에 대해서도 위와 같은 상삼각행렬 비슷한 것을 남길 수 있지 않을까?
또, 상삼각행렬의 꼴이 아니라 대각성분 위에 남아있는 숫자들도 모두 row operation을 취해줌으로써 소거해버리면 어떻게 될까?
LU 분해와 REF, RREF
※ REF는 Row-Echelon Form을 줄인 말이고, RREF는 Reduced Row-Echelon Form을 줄인 말입니다.
정방행렬이 아닌 직사각행렬(rectangular matrix)에 대해 row operation을 취해줌으로써 우리가 얻어야 하는 결과물은 마치 LU 분해를 수행해서 상삼각행렬(upper triangular matrix)를 얻은 것과 같은 형태일 수 있다.
대략적으로는 아래와 같은 모습을 띄고 있는 것이라고 말할 수 있다.
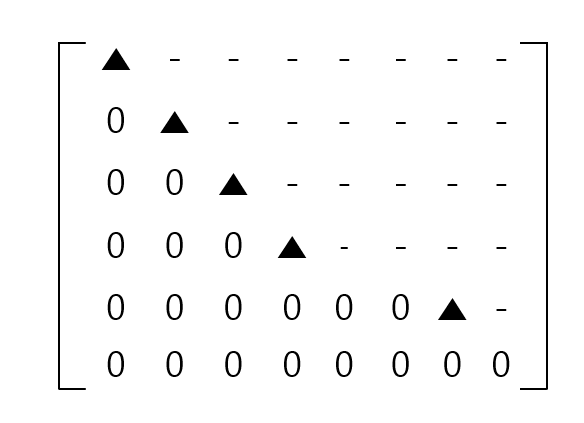
그림 2. 직사각 행렬에 대해 row operation을 수행해 얻고자 기대하는 결과물
그림 2와 같은 행렬을 우리는 row-echelon matrix 혹은 주어진 행렬의 row-echelon form이라고 한다. 한국말로는 사다리꼴 행렬이라고 부른다. (이 단어만은 한국어 표현이 잘못되었다고 생각해 row-echelon matrix라고 부르도록 하겠다.) 그림 2에서 삼각형(▲)과 하이픈(-)은 모두 0이 아닌 원소들을 의미한다. 또, 0이 아닌 행의 선행 계수인 삼각형(▲)을 특별히 피벗(pivot)이라고 이름 붙였고, pivot이 포함된 열(column)을 pivot column이라고 부른다.
용어를 어느정도 파악했을테니 row-echelon matrix가 갖는 특성을 글로 정리하자면 다음과 같다.
- 0이 아닌 모든 행은 모두 0 행 위에 있다 (즉, 모두 0 행은 행렬의 맨 아래에 있음).
- 0이 아닌 행의 선행 계수는 항상 위 행의 0이 아닌 첫 번째 항목의 오른쪽에 있다.
- 피벗 아래의 모든 열 항목은 0이다.
글로 써둔 것을 보면 헷갈리지만 아래와 같은 계단 형태를 띄고 있는 형태의 행렬이라는 것을 의미한다.
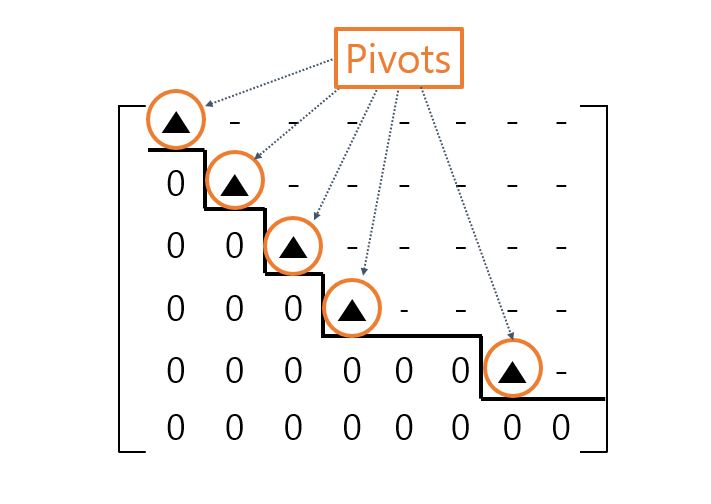
그림 3. row-echelon matrix는 계단 형태의 행렬이며 각 계단의 끄트머리에 발을 딛고 올라갈 부분을 pivot이라고 부른다.
다시 말해 row-echelon matrix는 직사각행렬 $A$에 대해 row operation을 수행한 결과로 얻어지는 행렬로 상삼각행렬과 유사한 형태와 기능을 갖는 행렬이다. 그리고 위에서 언급한 세 가지 특성을 가져야 한다. 따라서, row operation을 수행해주면서 해당 형태를 갖게끔 행교환을 계속 수행해줌으로써 얻을 수 있게 된다.
그리고 만약 여기서 scaling을 통해 pivot들을 모두 1로 만들고, pivot 위의 숫자들도 모두 0으로 만들어줄 수도 있을 것이다. 가령, 그림 3의 형태의 row-echelon form에 대해 다음과 같이 변형시킬 수 있다.
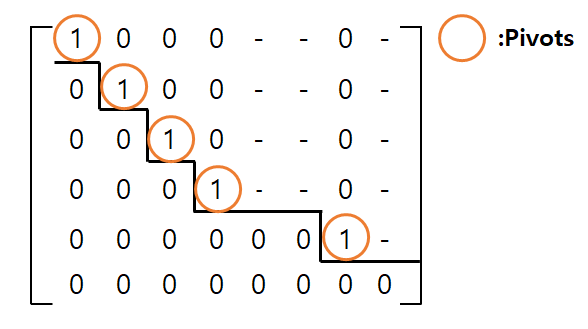
그림 4. row-echelon form에서 pivot 을 모두 1로 scaling 해주고 pivot 위의 값들도 모두 0으로 만들어주면 reduced-row echelon form이 된다.
Echelon이라는 단어의 번역에 대해서
Row-echelon 행렬은 한국말로는 사다리꼴 행렬이라고 번역한다.
이 번역은 아주 잘못된 번역의 좋은 예시로 볼 수 있을 것 같다. 그리고 이런 오역으로 인해 학생들이 row-echelon 행렬을 이해하는데 더 어려움을 가중할 것 같다.
우리가 보통 수학에서 사다리꼴이라고 하면 아래와 같은 도형을 생각하기 쉽다.
그림 5. 사다리꼴 도형의 형태
그런데 ‘사다리꼴’ 이 말하는 사다리(ladder)의 형태를 말하는 것이다. 즉,

그림 6. 그냥 사다리
왜냐면 echelon이라는 영어 단어가 ‘사다리’라는 뜻을 갖는 영단어에서 유래되었기 때문인 것으로 보인다. 하지만 여기서 row-echelon form이라는 뜻에서 echelon은 step-like architecture를 의미하는 것으로 보아야 타당하다.
다시 말하면, 행렬의 하단부에 0이 쏠려있다보니 그 0들의 형태가 마치 계단 형태인 것 처럼 보인다는 의미에서 echelon이라는 단어를 썼다고 보는 것이 더 낫다. 그리고 그래야 맥락에 맞지 않아 보이는 pivot이라는 용어도 단어의 이용 의도를 조금더 파악할 수 있게 된다.
REF & RREF의 형태 예시: 눈으로 구별해보세요.
Row-echelon 행렬의 개념은 처음 접하게 되면 어리둥절할 수 있다.
글로 써진 row-echelon 행렬의 특징이 쉽게 와닿긴 어렵기 때문이다. 그래서 몇 가지 예시를 가지고 row-echelon 행렬인지의 여부를 확인해보자.
REF는 Row-Echelon Form, RREF는 Reduced Row-Echelon Form을 각각 의미한다.
아래의 행렬은 REF이라고 할 수 있다.
\[\begin{bmatrix} 1 & - & - & - \\ 0 & 1 & - & - \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix}\]여기서 ‘-‘는 0이 아닌 숫자를 의미한다.
아래의 행렬은 또 REF이라고 할 수 있다. 꼭 첫번째 행의 첫번째 값이 non-zero term이 되어야 한다는 요구 조건은 없다.
\[\begin{bmatrix} 0 & 3 & - & - & - & - & -\\ 0 & 0 & 2 & - & - & - & -\\ 0 & 0 & 0 & 0 & 0 & 5 & -\\ 0 & 0 & 0 & 0 & 0 & 0 & - \end{bmatrix}\]그런데, 아래의 행렬은 REF이 아니다. 0으로만 구성된 행은 가장 아래에 위치해야 한다는 법칙을 어긴 것이기 때문이다.
\[\begin{bmatrix} 1 & - & - & - \\ 0 & 2 & - & - \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}\]또, 아래와 같은 꼴의 행렬도 REF이 아니다. 세 가지 특성 중 두 번째를 어겼기 때문이다. 다시 말해 두번째 행의 0이 아닌 선행 계수가 첫 번째 행의 0이 아닌 선행 계수보다 왼쪽에 위치하기 때문이다.
\[\begin{bmatrix} 0 & 1 & - & - \\ 1 & - & - & - \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix}\]또 아래와 같은 행렬도 REF이 아니다. 두 번째 pivot인 4가 포함되어 있는 2열을 보면 pivot인 4 아래의 모든 항이 0으로 표시되어 있지 않기 때문이다.
\[\begin{bmatrix} 3 & - & - & - \\ 0 & 4 & - & - \\ 0 & 2 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix}\]아래의 행렬은 RREF이라고 할 수 있다.
\[\begin{bmatrix} 1 & 0 & 3 & 2 \\ 0 & 1 & 4 & 5 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix}\]그러나 아래의 행렬은 RREF이 아니다. pivot의 정의 상 2행 2열의 4는 2행의 pivot인데, RREF라면 pivot이 모두 1이 되어야 하기 때문이다.
만약 여기서 2행에 1/4를 모두 곱해주면 RREF이 된다.
\[\begin{bmatrix} 1 & 0 & 0 & 2 \\ 0 & 4 & 1 & 5 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix}\]REF & RREF 직접 구해보기
손으로 REf, RREF 구하기
아래의 행렬 $A$에 대해 elementary row operation을 수행해 row-echelon matrix를 얻어보자.
\[\begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 2 & 6 & 4 & 6 & 2 \\ 3 & 3 & 8 & 12 & 17 \end{bmatrix}\]다음과 같은 row operation들을 수행하자.
\[r_2 \rightarrow r_2- 2r_1\] \[r_3 \rightarrow r_3- 3r_1\]그러면 다음과 같은 행렬을 얻을 수 있게 된다.
\[\begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 0 & 4 & 0 & 0 & -6 \\ 0 & 0 & 2 & 3 & 5 \end{bmatrix}\]여기까지만 구하면 이것이 행렬 $A$의 row-echelon form이다.
여기서 2행에 1/4를 곱해주고 3행에 1/2를 곱해주자.
즉,
\[r_2 \rightarrow \frac{1}{4}r_2\] \[r_3 \rightarrow \frac{1}{2}r_3\]연산을 취해주면 다음과 같이 행렬이 수정된다.
\[\begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 0 & 1 & 0 & 0 & -3/2 \\ 0 & 0 & 1 & 3/2 & 5/2 \end{bmatrix}\]여기서 pivot 위의 값들도 모두 0으로 만들어주기 위해 아래와 같은 두 개의 행연산을 취해주자.
\[r_1 \rightarrow r_1 - r_2\] \[r_1 \rightarrow r_1 - 2r_3\]그러면 최종적으로 다음과 같은 행렬을 얻을 수 있게 된다.
\[\begin{bmatrix} 1 & 0 & 0 & 0 & 1/2 \\ 0 & 1 & 0 & 0 & -3/2 \\ 0 & 0 & 1 & 3/2 & 5/2 \end{bmatrix}\]이것이 행렬 A의 reduced-row echelon form이다.
MATLAB에서 REF, RREF 구하기
MATLAB이나 여타 선형대수학을 위한 계산 도구를 통해 주어진 행렬의 Row Echelon Form(REF) 혹은 Reduced Row Echelon Form(RREF)를 계산할 수 있다.
그런데, REF는 유일하게 결정되지는 않는다. 가령, 어떤 행렬의 REF을 구할 때 pivot 값을 약분해주지 않더라도 여전히 REF로 볼 수 있다.
가령 아래와 같은 행렬 $A$에 대해,
\[A = \begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 2 & 6 & 4 & 6 & 2 \\ 3 & 3 & 8 & 12 & 17 \end{bmatrix}\]REF 중 하나는 다음과 같은 것일 수 있다.
\[REF(A)_1 = \begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 0 & 4 & 0 & 0 & -6 \\ 0 & 0 & 2 & 3 & 5 \end{bmatrix}\]그런데, 가령 2번 행에 1/2를 곱해주더라도 여전히 REF의 꼴임을 알 수 있다.
\[REF(A)_2 = \begin{bmatrix} 1 & 1 & 2 & 3 & 4 \\ 0 & 2 & 0 & 0 & -3 \\ 0 & 0 & 2 & 3 & 5 \end{bmatrix}\]그래서 REF는 유일하게 결정되지는 않지만 MATLAB에서는 LU분해에 사용되는 lu 함수를 이용해 REF 유사한 것을 얻을 수 있게 된다.
MATLAB에서 아래와 같이 커맨드를 입력해보면,
A = [1, 1, 2, 3, 4; 2, 6, 4, 6, 2; 3, 3, 8, 12, 17]
[~, ref_A]=lu(A);
아래와 같이 REF를 얻을 수 있다.
원래 ref_A는 LU 분해를 통해 얻은 상삼각행렬(upper triangular matrix)이 들어오는 자리.
ref는 유일하게 결정되지 않아서 손으로 푼 REF 결과와 MATLAB의 LU 분해 결과는 다를 수 있다.
rref_A = rref(A);
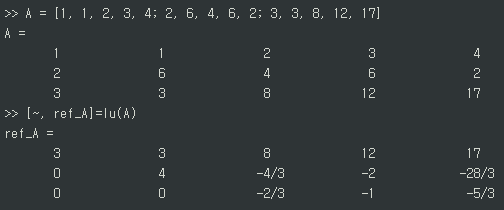
그림 7. MATLAB으로 구한 행렬 A의 Row-Echelon Form
반면 RREF는 pivot을 약분해주고 pivot 위의 원소들도 모두 소거해주기 때문에 유일하게 결정된다.
MATLAB에서는 rref()라는 함수를 이용해 RREF를 구할 수 있다.
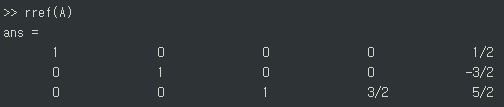
그림 8. MATLAB으로 구한 행렬 A의 Reduced Row-Echelon Form
REF와 RREF의 쓸모
RREF: 역행렬의 계산
$Ax=b$에서 $b$ 벡터가 여러 종류일 때, 한꺼번에 해 $x$들을 구할 수 있다.
가령, 아래와 같이 세 가지 경우의 솔루션을 얻고자 한다고 하자.
\[\begin{cases}3x-z = 1 \\ x+2y+3z = 1 \\ 2x-y+z=1\end{cases}\] \[\begin{cases}3x-z = 2 \\ x+2y+3z = 2 \\ 2x-y+z=2\end{cases}\] \[\begin{cases}3x-z = 3 \\ x+2y+3z = 3 \\ 2x-y+z=3\end{cases}\]그러면 각각의 경우에 대해서 세 번의 계산을 할 것이 아니라 다음과 같이 augmented matrix를 구성하고 가우스-조던 소거를 수행하면 한번에 세 가지 방정식을 다 풀어낼 수 있게 된다.
\[\left[\begin{array}{ccc|ccc} 3 & 0 & -1 & 1 & 2 & 3 \\ 1 & 2 & 3 & 1 & 2 & 3 \\ 2 & -1 & 1 & 1 & 2 & 3 \end{array}\right]\]이것은 다시 말해 다음과 같은 행렬 문제를 푸는 것과 다르지 않다.
\[AB= \begin{bmatrix}3 & 0 & -1 \\ 1 & 2 & 3 \\ 2 & -1 & 1\end{bmatrix} \begin{bmatrix}x_{11} & x_{12} & x_{13} \\ x_{21} & x_{22} & x_{23} \\ x_{31} & x_{32} & x_{33}\end{bmatrix} =\begin{bmatrix}1 & 2 & 3 \\ 1 & 2 & 3 \\ 1 & 2 & 3\end{bmatrix}\]그럼 만약 이렇게 augmented matrix를 쓸 수 있다는 점을 응용해 augmented matrix를 다음과 같이 설정하면 어떨까?
\[\left[\begin{array}{ccc|ccc} 3 & 0 & -1 & 1 & 0 & 0 \\ 1 & 2 & 3 & 0 & 1 & 0 \\ 2 & -1 & 1 & 0 & 0 & 1 \end{array}\right]\]즉, $B$라는 행렬은 $A$라는 행렬 뒤에 곱해져서 결과로써 단위 행렬을 출력해주어야 한다.
다시 말해 $B$ 행렬은 $A$ 행렬의 역행렬이다.
즉, 위의 augmented matrix에 대해 가우스-조던 행렬 소거를 적용해 reduced-row echelon matrix로 만들어주면 다음과 같다.
\[\left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 1/4 & 1/20 & 1/10 \\ 0 & 1 & 0 & 1/4 & 1/4 & -1/2 \\ 0 & 0 & 1 & -1/4 & 3/20 & 3/10 \end{array}\right]\]그러므로 $A$의 역행렬을 다음과 같이 계산할 수 있는 것이다.
\[A^{-1}=\begin{bmatrix} 1/4 & 1/20 & 1/10 \\ 1/4 & 1/4 & -1/2 \\ -1/4 & 3/20 & 3/10 \end{bmatrix}\]행동치 관계를 통한 솔루션 계산
연립방정식의 해를 구할 때는 방정식에 상수배를 취해주거나, 방정식 끼리 더해주거나, 방정식의 순서를 바꿔주는 과정을 통해 해를 얻을 수 있다.
그리고, 기본 행렬 편에서 보았던 것 처럼 연립방정식에 적용하던 테크닉들을 행렬 연산으로 옮겨놓은 것이
row operation이다. row operation은 행렬의 한 행을 상수배해주는 것, 행렬의 행 끼리 더해주는 것, 그리고 행의 순서를 바꿔주는 세 가지 테크닉을 의미한다.
연립방정식의 해를 구할 때 상수배, 방정식 끼리 더 해주기, 순서 바꿔주기를 해주어도 해에는 변함이 없는 것 처럼 row-operation을 수행해주어도 해는 여전히 동일하게 유지된다.
그러니까 원래 행렬을 $A$, 그 행렬의 REF를 $U$, RREF를 $R$이라고 하면 $Ax=b$, $Ux=c$, $Rx=d$의 해는 모두 동일하다.
(이 때, $c$와 $d$는 $A$를 $U$ 혹은 $R$로 바꿔주면서 우항의 벡터 $b$가 변형된 것이다.)
조금 어려운 말로 하면 $A$와 $U$와 $R$은 모두 행동치(row-equivalent)이다.
다른 말로 하면 row operation을 수행해주더라도 row space의 변화는 없다고 할 수 있다. 하지만 column space에는 변화가 생긴다.
예를 들어 아래와 같은 연립방정식을 푼다고 생각해보자.
\[\begin{cases}3x+3y+z=3 \\ 4x+5y+2z=1 \\ 2x+5y+z = 3 \end{cases}\]그것은 아래와 같은 행렬식을 푸는 것과 같다고 할 수 있다.
\[\begin{bmatrix}3 & 3 & 1 \\ 4 & 5 & 2 \\ 2 & 5 & 1 \end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}3\\1\\3\end{bmatrix}\]그런데, REF를 구해서 $Ux=c$의 꼴로 만들어준 다음 해를 구해도 마찬가지 위 방정식의 해와 동일한 해를 구할 수 있다.
\[\begin{bmatrix}4 & 5 & 2 \\ 0 & 5/2 & 0 \\ 0 & 0 & -1/2 \end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}1\\5/2\\3\end{bmatrix}\]그리고 RREF를 구해서 $Rx=d$의 꼴로 만들어준 다음 해를 구해도 마찬가지 해를 구할 수 있다.
\[\begin{bmatrix}1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}2\\1\\6\end{bmatrix}\]해를 구하기에 가장 쉬워보이는 방정식은 $Rx=d$이고 $x,y,z$는
\[x=2, y= 1, z= -6\]임을 쉽게 알 수 있다.
행 벡터의 선형 독립 / 종속 판별
임의의 벡터 $v_1$, $v_2$에 대해 두 벡터가 선형 독립인지 판별하기 위해선 다음과 같은 과정을 수행해볼 수 있다.
\[c_1 v_1 + c_2 v_2 = 0\]과 같은 식을 생각했을 때, 0이 아닌 $c_1$, $c_2$를 가지고 위 식이 성립할 수 있다면 두 벡터 $v_1$과 $v_2$는 선형독립이 아니다. 다른 말로는 선형 종속이라고 한다.
다시 말해, 위 식을 다시 정리하면,
\[v_1 = -\frac{c_2}{c_1}v_2\]가 될텐데, 위 식을 만족할만한 0이 아닌 $c_1$, $c_2$가 존재한다는 뜻이 되므로 $v_1$과 $v_2$는 상수배라는 의미이다.
반대로 $c_1 v_1 + c_2 v_2 = 0$을 만족할 수 있는 $c_1$, $c_2$ 오직 0만 가능하다면 $v_1$과 $v_2$는 선형 독립이라고 한다.
어떤 행렬의 Row-Echelon Form 혹은 Reduced Row-Echelon Form을 구하는 것은 row operation을 통해 수행하는 것이다.
이 때, 만약 row operation을 통해서 어떤 행이 all zero 가 된다면, all zero가 된 행은 다른 행들의 선형조합으로 얻어낼 수 있는 행이었다는 뜻이 된다.
다시 말해, 그 행은 다른 행들과 선형 종속이라는 의미이다.
가령 아래와 같은 행렬 $A$를 생각해보자.
\[A=\begin{bmatrix}5 & 3 & 3 \\ 5 & 1 & 3 \\ 5 & 2 & 3 \end{bmatrix}\]이 식을 잘 보면 세 번째 행은 다음과 같이 row operation 해주면 all-zero로 소거할 수 있다.
\[r_3 \rightarrow r_3 -\frac{1}{2}r_1-\frac{1}{2}r_2 = 0\]
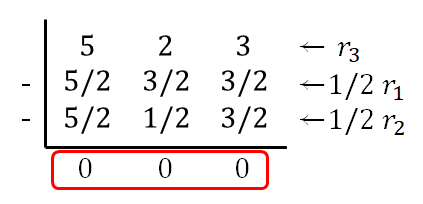
그림 9. 다른 행에 선형 종속인 행은 row operation을 통해 소거할 수 있다.
다시 말해 $r_3$은 $r_1$과 $r_2$의 선형결합으로 표현해줄 수 있다.
\[r_3 = 0.5 r_1 + 0.5 r_2\]행렬의 rank 계산
free variable이 어떤 것인지 확인
non-zero row, pivot column, free column
complete solution을 구하기 위해 필요한 과정