Prerequisites
본 포스트를 잘 이해하기 위해선 아래의 내용에 대해 알고 오는 것이 좋습니다.
물리 시뮬레이션의 성능을 결정짓는 핵심 엔진인 Implicit Solver(암시적 솔버)와 Newton-Raphson(NR) 방법의 관계를 정리해 본다. Simscape나 ode15s가 왜 Stiff한 문제에서 강력한지, 그 내부 수학적 원리를 코드로 풀어서 설명한다.
솔버의 두 얼굴: Forward Euler vs. Backward Euler
우선 컴퓨터가 ODE를 이산화해서 푸는 방법에 대해 먼저 이해해보자. 아주 기초적인 1차, 1계 미분방정식의 예로부터 시작해보자.
\[\frac{dx}{dt}=f(t, x) % 식 (1)\]식 (1)은 1차, 1계 미분방정식인데 이 식을 이해하는 방법은 크게 두 가지이다. 우선 미분 계수를 좌변에 모두 몰아넣고, 우변에는 $t$와 $x$로 구성된 다항식을 몰아넣은 것으로 보는 것이다. 생긴것 그대로 이해하는 것이라고 할 수 있다. 두 번째 방법은 좌변과 우변을 뒤집어서 생각해본 것으로 모든 $(t,x)$에 기울기 $dx/dt$가 정의되어 있다고 이해하는 것이다.
예를 들어 $dx/dt=x$의 경우 아래와 같이 모든 $(t, x)$에 아래와 같이 기울기가 세로축의 $x$의 값에 비례하는 기울기가 정의되어 있는 것을 알 수 있다. 그림 1과 같은 것을 “방향장 (direction field)”라고 부른다.
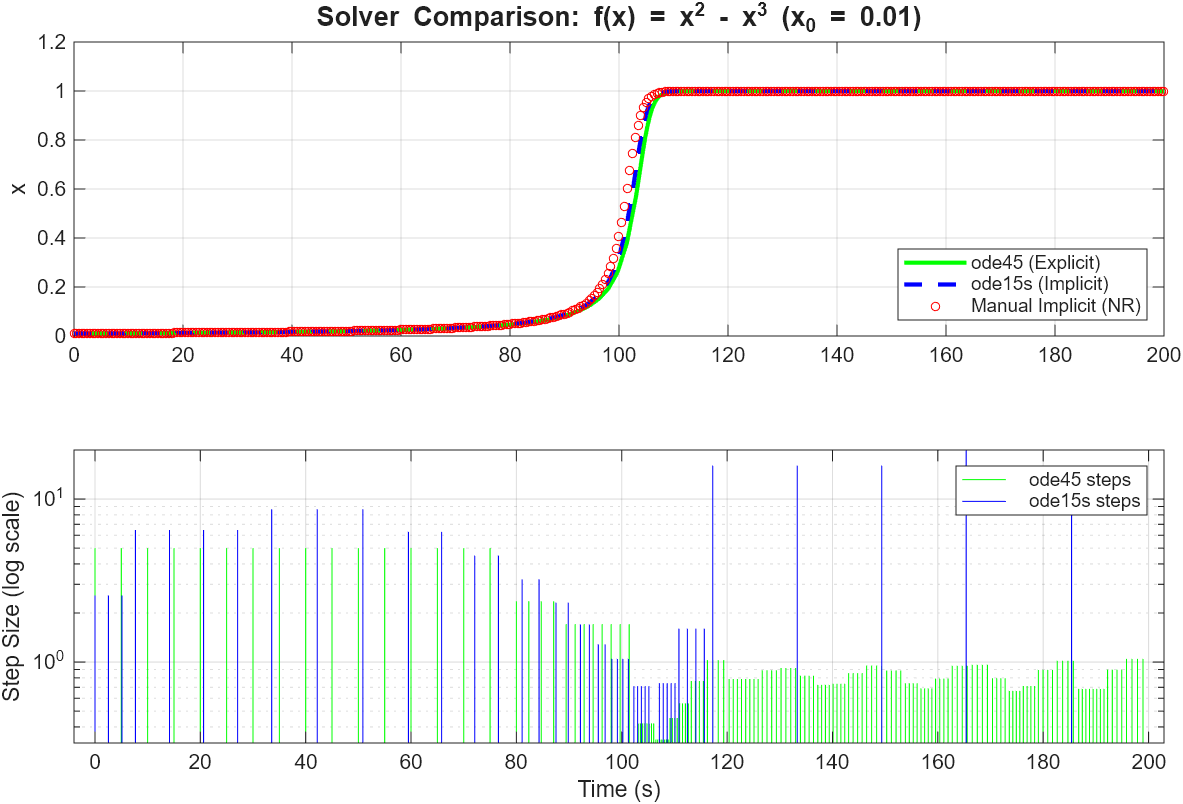
그림 1. 미분 방정식 dx/dt=x 의 방향장
이렇듯 방향장을 생각해볼 수 있다면, 우리가 점을 하나 놓기만 하면 그 앞뒤의 값들을 그 점이 놓인 기울기를 가지고 예측할 수 있다는 것을 생각해볼 수 있다.
그림 2. 방향장 위에 점을 하나 놓으면 그 점 앞뒤의 값들을 예측해볼 수 있다.
미분방정식은 수식을 전개해가면서 풀 수도 있지만 그림 2에서와 같이 초기값과 그 전후의 관계를 통해서 수치적으로 푸는 것도 가능하다. 이처럼 수치적으로 미분 방정식 $\dot{x} = f(x)$을 풀기 위해서는 연속적인 시간을 잘게 쪼개는 ‘이산화(Discretization)’ 과정이 필요하다. 즉, 하나의 이어진 선으로 볼 게 아니라 앞 뒤 점들을 찾는 과정으로 생각해보자.
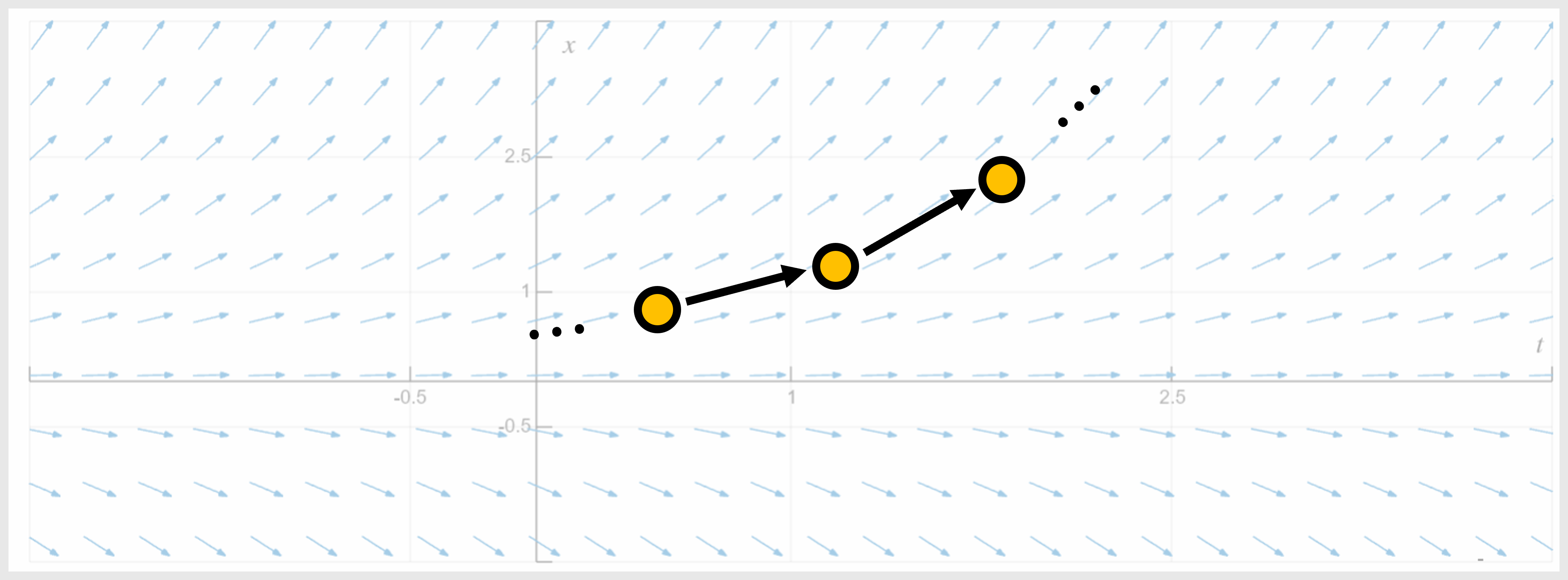
그림 3. 미분 방정식 (예:dx/dt=x) 의 방향장에서 초기값의 전후 값을 이산적으로 찾을 수 있다.
앞 뒤 점의 $x$가 무엇인지 결정하는 방법은 크게 explicit 방법과 implicit 방법으로 나눌 수 있다.
1. Explicit Solver (대표적으로 Forward Euler)
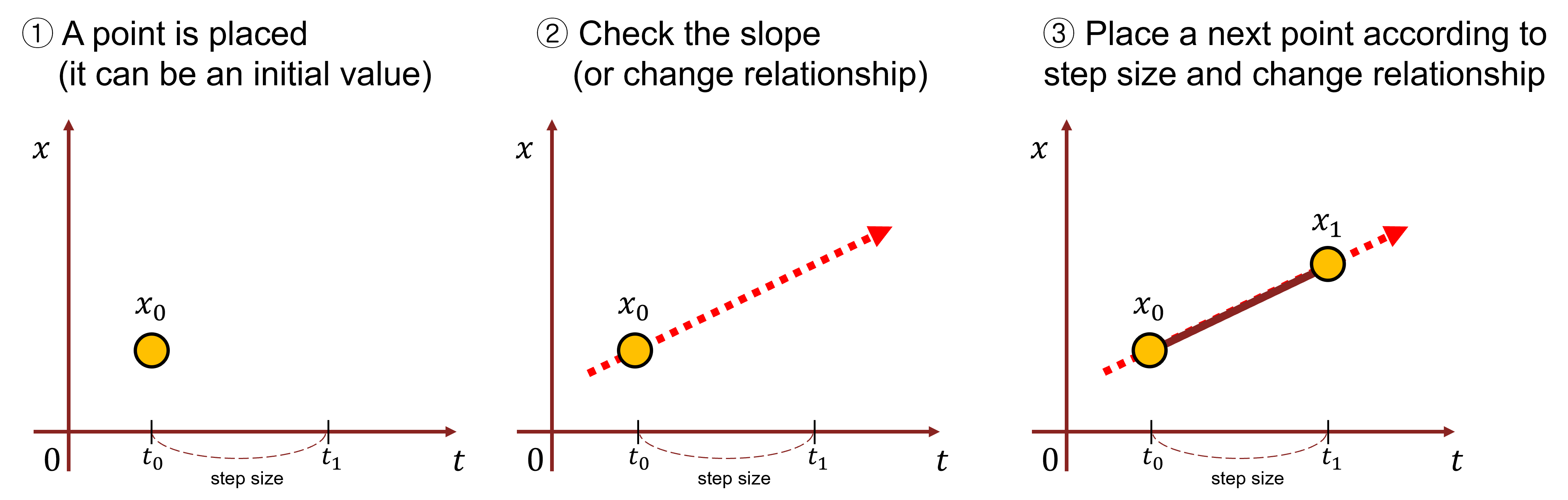
그림 4. Explicit solver가 초기값 전후의 값을 찾아가는 방법
가장 직관적인 방법이다. 현재 지점($x_n$)에서의 기울기를 보고 다음 지점($x_{n+1}$)을 결정한다.
\[x_{n+1} = x_n + h \cdot f(x_n)\]그림 4에서 처럼 초기값이 놓여지면 그 초기값의 변화율 관계를 통해 다음 값을 찾는다. 우리는 $f(t, x)$에 대응하는 모든 기울기 혹은 변화율을 알고 있으므로 이와 같은 계산이 가능하다.
- 장점: 계산이 매우 빠르고 단순하다. 우변에 모르는 값($x_{n+1}$)이 없기 때문에 바로 답이 나온다.
- 단점: 시스템이 급격히 변하는(Stiff) 구간에서 보폭($h$)을 조금만 크게 가져가도 궤도를 이탈하며 결과가 폭발(발산)한다. 소위 ‘눈 감고 뛰는 것’과 비슷하다.
2. Implicit Solver (대표적으로 Backward Euler)
Implicit Solver는 Explicit Solver가 했던 일에서 추가 확인을 거친다.
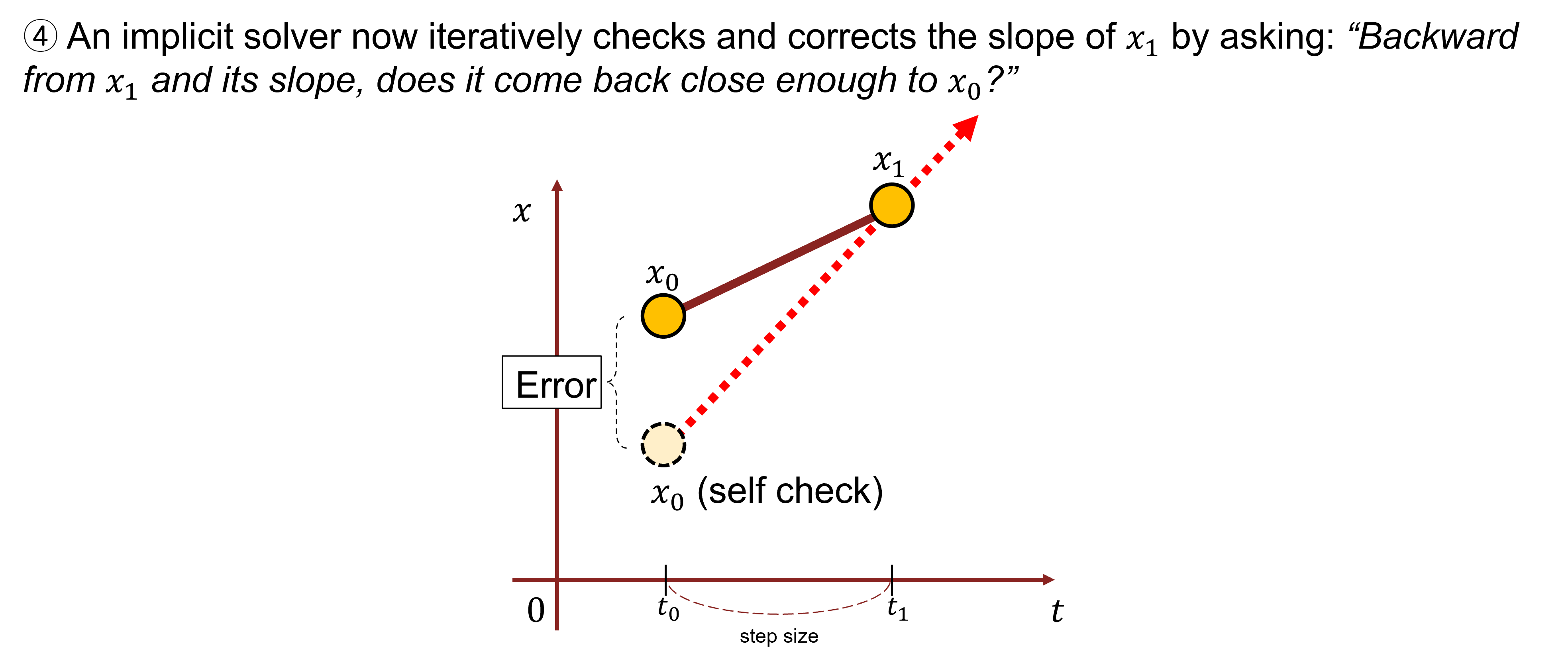
그림 5. Implicit Solver는 다음 스텝의 값이 지금까지의 경향과 얼마나 일치하는지도 확인한다.
다시 말해, 후방 오일러는 내가 도착할 미래 지점($x_{n+1}$)에서의 기울기를 미리 참조한다.
\[x_{n+1} = x_n + h \cdot f(x_{n+1})\]이 때 $x_{n+1}$ 값은 Explicit solver가 했던 것 처럼 한번 구한 것을 초기값으로 쓰고 그 이후에 Error가 적어질 수 있도록 내부적으로 Newton-Raphson 방법 등을 활용한다. 에러가 특정 기준보다 작아지거나 반복회수를 초과하면 추가 확인을 마치거나 할 수 있다.
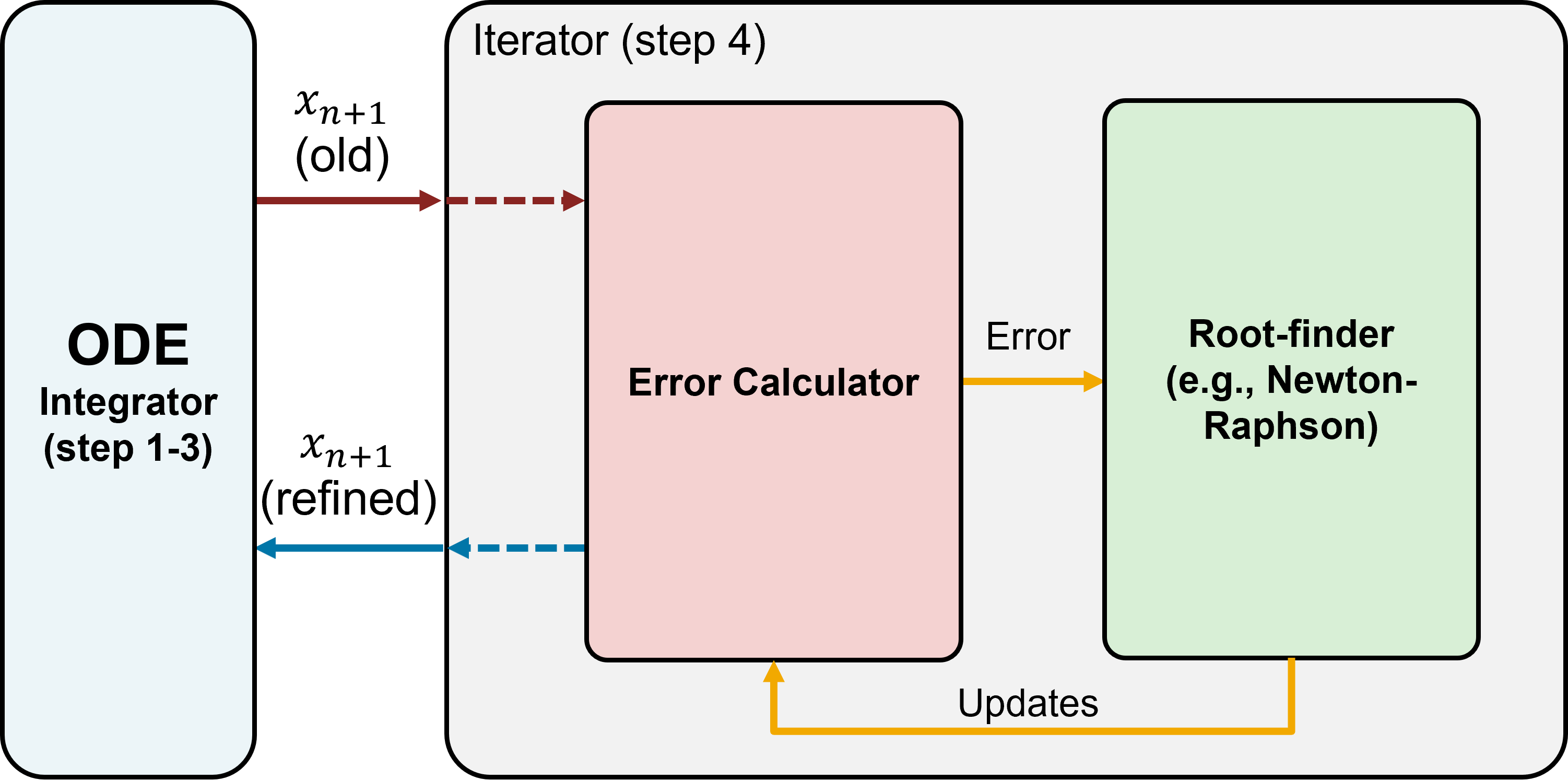
그림 6. Implicit Solver의 작업 흐름도
- 특징: 식의 양변에 모두 $x_{n+1}$이 들어있다. 즉, $x_{n+1}$을 구하기 위해선 방정식을 다시 풀어야 하는 ‘암시적(Implicit)’ 구조다.
- 장점: 수학적으로 매우 안정적이다. 미래의 기울기를 미리 반영하기 때문에 보폭을 크게 가져가도 궤도를 크게 벗어나지 않는다.
왜 Explicit 솔버는 한계가 있는가?
우리가 흔히 쓰는 ode45 같은 현시적(Explicit) 솔버는 현재 위치의 기울기만 보고 다음 발걸음을 뗀다. 하지만 시스템이 급격하게 변하는 ‘Stiff’한 구간에 들어서면, 조금만 보폭($h$)을 크게 가져가도 궤도를 이탈하여 결과값이 발산해버린다.
이를 해결하기 위해 등장한 것이 암시적(Implicit) 솔버다. 이 솔버는 단순히 현재를 보는 게 아니라, “내가 도착할 다음 지점에서도 물리 법칙이 성립하는가?”를 확인하며 나아간다.
1. 암시적 솔버의 핵심: 잔차 식(G)
미분 방정식 $\dot{x} = f(x)$를 풀 때, 후방 오일러(Backward Euler) 방식은 다음과 같은 식을 세운다.
\[x_{n+1} = x_n + h \cdot f(x_{n+1})\]여기서 우변에 우리가 구하려는 미래의 값 $x_{n+1}$이 들어있다는 점이 핵심이다. 이 식을 만족하는 $x_{n+1}$을 찾기 위해 모든 항을 한쪽으로 몰아 잔차 식(Residual) $G$를 정의한다.
\[G(x_{n+1}) = \underbrace{(x_{n+1} - x_n)}_{\text{현재 상황; 실제 변화량}} - \underbrace{h \cdot f(x_{n+1})}_{\text{이상적인 상황; 물리 법칙}}\]‘물리 법칙 위반 성적표’란 무엇인가?
이 잔차 식 $G$는 현재 우리가 추측한 $x_{n+1}$이 자연의 법칙을 얼마나 잘 따르고 있는지를 보여주는 성적표와 같다. 식의 의미를 공학적으로 뜯어보면 다음과 같다.
- 현실 (Left): 내가 계산기로 두드려보니 전압이 $x_n$에서 $x_{n+1}$로 변했다. 즉, $(x_{n+1} - x_n)$만큼 실제로 이동했다는 뜻이다.
- 이상 (Right): 물리 법칙($f$)에 $x_{n+1}$을 대입해 보니 “이 지점에선 이 정도 속도로 움직여야 해”라고 명령한다. 여기에 시간 $h$를 곱한 $h \cdot f(x_{n+1})$은 물리 법칙이 정해준 ‘규정 이동 거리’가 된다.
만약 우리가 찾은 $x_{n+1}$이 정답이라면, [내가 실제로 이동한 거리]와 [물리가 가라고 명령한 거리]가 정확히 일치해야 한다.
- $G = 0$ 이면: “성적표 만점!” 자연의 법칙과 완벽하게 일치하는 다음 상태를 찾은 것이다.
- $G \neq 0$ 이면: “규정 위반!” 물리는 이만큼 가라고 했는데, 내 계산 값은 저만큼 가 버렸다. 그 차이($G$)가 바로 오차이며, 솔버는 이 위반 점수를 0점으로 만들기 위해 값을 끊임없이 수정한다.
결국, Simscape가 시뮬레이션 중에 “수렴(Convergence)에 실패했다”는 메시지를 띄우는 것은, 이 성적표의 오차 $G$를 도저히 0으로 만들 수 없는 물리적 모순이 모델 안에 있다는 뜻이다.
2. 수학적 지우개: Newton-Raphson (NR)
잔차 $G$를 0으로 만들기 위해 사용하는 가장 강력한 도구가 바로 Newton-Raphson(NR) 반복법이다. 단순히 무작위로 값을 대입하며 정답을 찍는 게 아니라, 현재 위치에서 자코비안(Jacobian, $J$)이라는 수학적 나침반을 보고 정답($G=0$)을 향해 최단 거리로 전진한다.
자코비안(J): 정답을 향한 내비게이션
자코비안은 “내가 추측값($x$)을 아주 살짝 바꿨을 때, 물리 위반 성적표($G$)가 얼마나 예민하게 변하는가?”를 나타내는 지표다.
- 수학적 정의: $J = \frac{dG}{dx_{n+1}} = 1 - h \cdot \frac{df}{dx_{n+1}}$
- 공학적 의미: 현재 안갯속(비선형 시스템)에 갇혀 있을 때, 발밑의 경사도(기울기)를 확인하여 “어느 방향으로 얼마만큼 가야 평지(정답)에 도달할지”를 알려주는 가이드라인이다.
업데이트
\[x_{new} = x_{old} - \frac{G}{J}\]이 식은 NR의 핵심 알고리즘으로, 다음과 같은 논리 구조를 가진다.
- 위반 점수($G$)가 크면: “정답에서 멀리 떨어져 있구나!” $\rightarrow$ 더 많이 이동한다.
- 기울기($J$)가 가파르면: “조금만 움직여도 점수가 팍팍 변하네?” $\rightarrow$ 신중하게 조금만 이동한다.
이 두 값을 조합한 step = G / J만큼 현재 값을 수정해 나가면, 놀랍게도 단 몇 번의 반복(Iteration)만으로 오차 $G$는 순식간에 0에 수렴하게 된다.
Implicit 솔버가 ‘보폭(h)’을 키울 수 있는 비결
Explicit 솔버(Forward Euler)가 한 번의 계산으로 끝내는 ‘단거리 달리기’라면, NR을 사용하는 Implicit 솔버는 “예측하고, 검토하고, 수정하는” 과정을 거치는 ‘정밀 타격’과 같다.
- Self-Correction: 설령 보폭($h$)을 크게 가져가서 첫 추측이 빗나가더라도, NR 루프가 잔차($G$)를 확인하며 정답 궤도로 끊임없이 수정해 준다.
- Numerical Stability: 이 ‘자기 수정 능력’ 덕분에 시스템이 딱딱하게(Stiff) 굳어 있는 구간에서도 수치적 폭주 없이 안정적으로 해를 찾아낼 수 있는 것이다.
3. MATLAB으로 구현하는 Implicit Solver
다음은 $f(x) = x^2 - x^3$라는 Stiff한 시스템을 직접 구현한 코드이다. Newton-Raphson 루프가 어떻게 작동하는지 주목해 보자.
clear; clc; close all;
%% 1. 파라미터 및 시스템 설정
% f(x) = x^2 - x^3
% dx/dt가 x=1 부근에서 매우 민감하게 변하는 Stiff 특성
t_end = 200;
x0 = 0.01; % 초기값 (0.01에서 시작해 1로 수렴하는 과정 관찰)
f = @(t, x) x^2 - x^3; % dx/dt = f 임.
% 자코비안 (NR을 위한 미분값): df/dx = 2*x - 3*x^2
dfdx = @(x) 2*x - 3*x^2;
%% 2. MATLAB 내장 솔버 (Variable-step)
% ode45: Explicit (이 문제에서 스텝을 아주 잘게 쪼개야 함)
[t45, x45] = ode45(f, [0 t_end], x0);
% ode15s: Implicit (Stiff한 구간을 성큼성큼 넘어감)
[t15s, x15s] = ode15s(f, [0 t_end], x0);
%% 3. 수동 구현: Implicit Euler (Fixed-step, Newton-Raphson)
h = 0.5; % 매우 큰 고정 스텝 (Explicit였다면 수치 오류가 날 수 있는 크기)
t_manual = 0:h:t_end;
x_manual = zeros(size(t_manual));
x_manual(1) = x0;
for n = 1:length(t_manual)-1
xc_now = x_manual(n);
xc_next = xc_now; % 초기 추정값
% Newton-Raphson Iteration
for iter = 1:20
% 잔차 G(x_next) = x_next - x_now - h * f(x_next) = 0
G = xc_next - xc_now - h * (xc_next^2 - xc_next^3);
% 자코비안 J = dG/dx_next = 1 - h * df/dx
J = 1 - h * dfdx(xc_next);
step = G / J;
xc_next = xc_next - step;
if abs(step) < 1e-8, break; end
end
x_manual(n+1) = xc_next;
end
%% 4. 결과 비교 시각화
figure('Color', 'w', 'Position', [100, 100, 900, 550]);
subplot(2,1,1);
plot(t45, x45, 'g-', 'LineWidth', 2); hold on;
plot(t15s, x15s, 'b--', 'LineWidth', 2);
plot(t_manual, x_manual, 'ro', 'MarkerSize', 4);
grid on;
ylabel('x', 'FontSize', 11);
title(['Solver Comparison: f(x) = x^2 - x^3 (x_0 = ', num2str(x0), ')'], 'FontSize', 13);
legend({'ode45 (Explicit)', 'ode15s (Implicit)', 'Manual Implicit (NR)'}, 'Location', 'southeast');
% 스텝 사이즈 비교 (솔버가 얼마나 고생하는지 시각화)
subplot(2,1,2);
stem(t45(1:end-1), diff(t45), 'g', 'Marker', 'none'); hold on;
stem(t15s(1:end-1), diff(t15s), 'b', 'Marker', 'none');
set(gca, 'YScale', 'log'); % 로그 스케일로 스텝 크기 차이 강조
grid on;
ylabel('Step Size (log scale)', 'FontSize', 11);
xlabel('Time (s)', 'FontSize', 11);
legend({'ode45 steps', 'ode15s steps'});
fprintf('--- Solver Statistics ---\n');
fprintf('ode45 Total Steps: %d\n', length(t45));
fprintf('ode15s Total Steps: %d\n', length(t15s));
fprintf('Manual (h=%g) Steps: %d\n', h, length(t_manual));
결과적으로 step의 개수는 아래와 같다.
--- Solver Statistics ---
ode45 Total Steps: 157
ode15s Total Steps: 50
Manual (h=0.5) Steps: 401
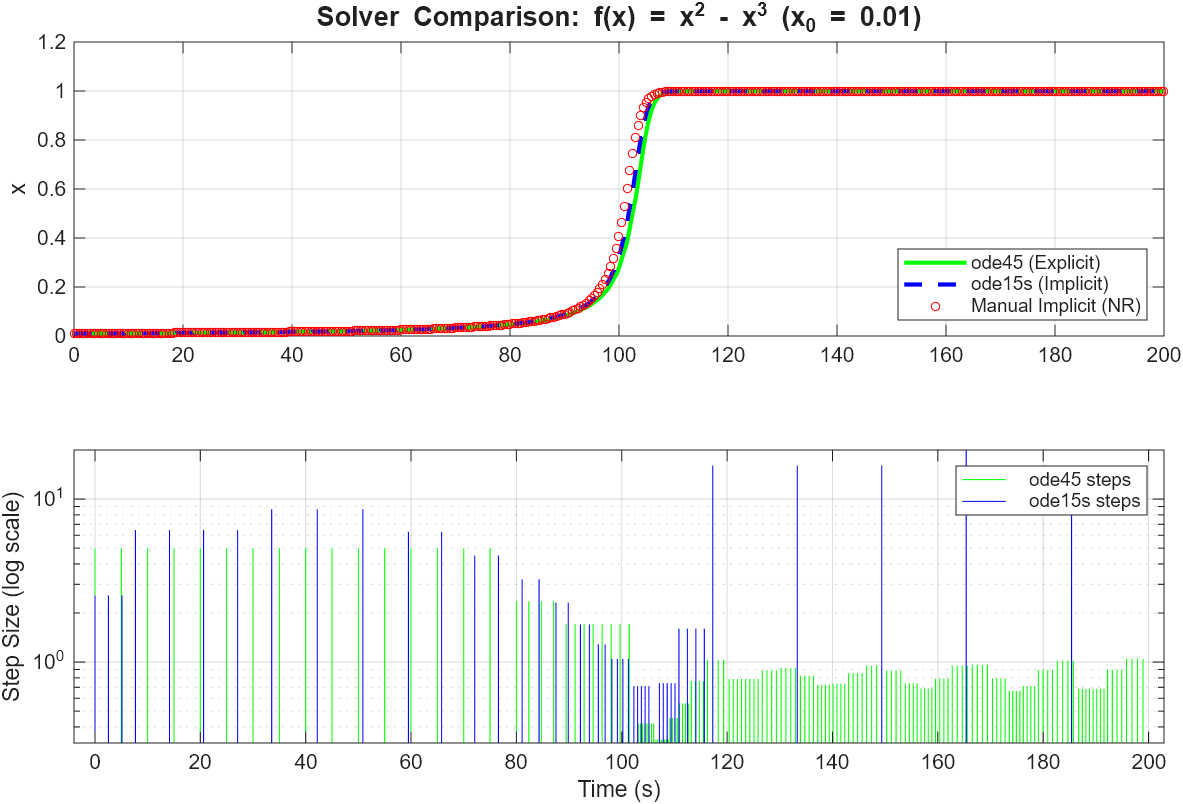
그림 7. ode45, ode15s와 함께 수동으로 구현한 implicit solver의 결과 비교
결론: 왜 우리는 이 원리를 알아야 하는가?
Simscape나 Simulink의 ode15s 솔버를 쓸 때 내부적으로 일어나는 일이 바로 이 ‘예측과 수정’의 반복이다.
- 시스템이 Stiff(강성)해지면 일반 솔버는 보폭을 줄이느라 느려지지만, Implicit 솔버는 NR 덕분에 큰 보폭으로도 정확한 정답을 찾아간다.
- 시뮬레이션 중 ‘Convergence Error’가 발생한다면, 위 코드의 NR 루프에서 잔차 $G$를 0으로 만드는 데 실패했다는 뜻이다.
- 이 원리를 이해하면 모델링 단계에서 불필요한 불연속성을 제거하거나 솔버 설정을 튜닝하는 데 엄청난 통찰을 얻을 수 있다.
결국 고성능 시뮬레이션은 수학적 신뢰와 계산 효율성 사이의 줄타기이며, 그 중심에는 Newton-Raphson이라는 견고한 다리가 놓여 있다.
이 블로그 포스팅이 엔지니어들에게 도움이 되길 바란다.